


Силиконов робот-пипало създадоха учените

Инженерите от Масачузетския технологичен институт създадоха мек и гъвкав робот от силикон, вдъхновен от пипалата на октопод. Детайлите на иновацията са разпечатани на 3D принтер.
Повечето съвременни роботи са твърди, тоест състоящи се от твърди детайли с определена форма. Но има и алтернатива – така наречените меки роботи, които идеално подхождат за преодоляването на сложни маршрути.
Екип инженери от MIT под ръководството на Андрю Марчийз са разработили софтуер за мека ръка манипулатор, което ѝ позволява да регулира структура и самостоятелно да преодолява различни препятствия.
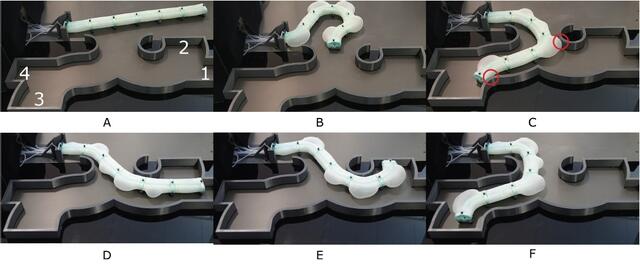
След това учените сглобили от детайлите, някои от които били разпечатани на 3D принтер, прототип на собствен мек робот, напомнящ змия или пипало – подвижна структура с вътрешна система от канали, 100% състояща се от силикон.
Трансформациите на "пипалото", позволяващи му да променя формата на своите модули, за да се движи, се осъществяват чрез манипулации със сгъстен въздух в двата основни канала във всеки от модулите манипулатори.
Това се случва по такъв начин: каналът от едната страна на модула се удължава, а каналът от противоположната страна се задържа и модулът започва да се огъва в една от страните – така се случва всеки път, когато роботът трябва да се обърне.
В бъдеще учените възнамеряват да превърнат своето "пипало" в ефективна ръка манипулатор, като добавят в конструкцията "пръсти", които биха могли да хващат предмети.
"Не казвам, че светът трябва да бъде запълнен с роботизирани пипала, работещи на конвейерите. Искам само да оспоря убеждението, че роботите трябва да изглеждат и работят по определен начин", казва Марчийз.












ТВ програма
Кино
- Сега Последният печели...
- 14:00 Телепазарен прозорец
- 14:15 Книга на книгите анимационен филм
- 14:45 Снежен свят тв филм /14 и 15 епизод/
- 15:45 Телепазарен прозорец
- 16:00 Бързо, лесно, вкусно
- 16:30 Светът и ние
- 16:55 България в 60 минути с Мариана...
- Сега "Присъда" - сериал, с.2, еп.16 /п./
- 15:00 Премиера: "Плен" - сериал, с.1,...
- 16:00 Премиера: "Моите братя и сестри" -...
- 17:00 bTV Новините
- 17:20 "Лице в лице" - публицистично...
- 18:00 "Стани богат" - телевизионна игра с...
- 19:00 bTV Новините - централна емисия
- 20:00 "Кой да знае?" - куиз шоу с водещ...
- Сега "Свободна да избира" (премиера) -...
- 15:00 "Лабиринт към щастието" (премиера)...
- 16:00 Новините на NOVA
- 16:10 "Пресечна точка" - публицистично шоу
- 17:00 "Семейни войни" - телевизионна игра
- 18:00 "Скрита самоличност" (премиера) -...
- 19:00 Новините на NOVA - централна емисия
- 20:00 "Черешката на тортата" (нов сезон)...

 Анализът им показва, че започването на пушенето и пушенето през целия живот е свързано с увеличаване на коремните мазнини.
Анализът им показва, че започването на пушенето и пушенето през целия живот е свързано с увеличаване на коремните мазнини.
